I have tried to avoid long numerical computations, thereby following Riemann's postulate that proofs should be given through ideas and not voluminous computations.
—
5.3 Hilbert's Axioms
Modified for
Plane Elliptic Geometry
I have tried to avoid long
numerical computations, thereby following Riemann's postulate that proofs should
be given through ideas and not voluminous computations.
—![]() David Hilbert (1862–1943)
David Hilbert (1862–1943)
Introductory Notes.
 Consider
three distinct collinear points A, B, and C in the Riemann
Sphere model. Depending on where we start, we could place the points in any of
the following orders: A-B-C, A-C-B, B-A-C, B-C-A, C-A-B, and C-B-A.
Hence, we cannot say one of the points is between the other two points.
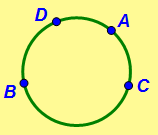
However, for four distinct collinear points A, B, C, and D, we
could say that two of them separate the other two. To cover this
problem, we replace the Axioms of Order with the Axioms of Separation. For
example, in the diagram on the right, point A and B separate
points C and D.
Consider
three distinct collinear points A, B, and C in the Riemann
Sphere model. Depending on where we start, we could place the points in any of
the following orders: A-B-C, A-C-B, B-A-C, B-C-A, C-A-B, and C-B-A.
Hence, we cannot say one of the points is between the other two points.
However, for four distinct collinear points A, B, C, and D, we
could say that two of them separate the other two. To cover this
problem, we replace the Axioms of Order with the Axioms of Separation. For
example, in the diagram on the right, point A and B separate
points C and D.
In order to use the Riemann Sphere model with the
following axiom set, we identify each pair of antipodal points as a single point
since two distinct lines are incident with a unique point, i.e., the Modified
Riemann Sphere model.
Undefined Terms point, line, lie, separate, and congruence.
I.1. For every two distinct points A and B, there exists a line m that contains each of the points A and B.
I.2. For every two distinct points A and B, there is no more than one line m that contain each of the points A and B.
I.3. There exist at least two distinct points on a line. There exist at least three points that do not lie on a line.
I.4. (Elliptic Parallel Postulate) For any two distinct lines m and n, there exists a unique point A contained by lines m and n.
Group II. Axioms of Separation (or Axioms of Order)
II.1. For any three distinct points A, B and C on a line m, there is a point D on m such that A and B separates C and D (denoted (A, B | C, D).
II.2. If (A, B | C, D), then the points A, B, C, and D are distinct and collinear.
II.3. If (A, B | C, D), then (B, A | C, D) and (C, D | A, B).
II.4. If (A, B | C, D), then A and C does not separate B and D.
II.5. For any four distinct collinear points A, B, C, and D, (A, B | C, D) or (A, C | B, D) or (A, D | B, C).
II.6. For any five distinct collinear points A, B, C, D, and E, if (A, B | D, E), then either (A, B | C, D) or (A, B | C, E).
II.7. Separation of points is invariant under a perspectivity, i.e., if (A, B | C, D) and there is a perspectivity mapping A, B, C, and D on line p to the corresponding points A', B', C', and D' on line p', then (A', B' | C', D').
Since in neutral geometry the definitions of segments, rays, angles, and triangles all depended on betweenness of points, the definitions all need to be revised based on the separation of points.
Exercise 5.1.1. Use the concepts from the separation axioms to write definitions for each of the following.
(a) segment
(b) ray (Note that in the spherical model a ray is a line.)
(c) angle (Note that at the vertex of an angle there are four
angles. Consider how to distinguish which is the particular angle desired.)
(d) triangle (Note that three noncollinear points determine more
than one triangle.)
Group III. Axioms of Congruence
III.1. If A, B are two points on a line m, and A' is a point on the same or on another line m' then it is always possible to find a point B' on a given side of the line m' through A' such that the segment AB is congruent to the segment A'B' (denoted AB ≅ A'B').
III.2. Congruence of segments is an equivalence relation.
III.3. If two segments are congruent, then their mutually complementary segments are congruent.
III.4. On the line m let AB and BC be two segments which except for B have no point in common. Furthermore, on the same or on another line m' let A'B' and B'C' be two segments which except for B' also have no point in common. In that case, if AB ≅ A'B' and BC ≅ B'C', then AC ≅ A'C'.
III.5. Let ∠(h,k) be an angle and m' a line and let a definite side of m'. Let h' be a ray on the line m' that emanates from the point O'. Then there exists one and only one ray k' such that the angle ∠(h,k) is congruent to the angle ∠(h',k') and at the same time all interior points of the angle ∠(h',k') lie on the given side of m'. Symbolically ∠(h, k) ≅ ∠(h',k'). Every angle is congruent to itself.
III.6. If for two triangles ABC and A'B'C' the congruences AB ≅ A'B', AC ≅ A'C', ∠BAC ≅ ∠B'A'C' hold, then the congruence ∠ABC ≅ ∠A'B'C' is also satisfied.
Group IV. Axiom of Parallels - Elliptic geometry has no parallel lines and hence the elliptic parallel postulate should probably be called the elliptic no parallels postulate.
See Group I. Axioms of Incidence - I.4. (Elliptic Parallel Postulate) For any two distinct lines m and n, there exists a unique point A contained by lines m and n.
Group V. Axiom of Continuity
V. (Dedekind's Axiom) Assume the set of all points on a segment AB is the union, S1 U S2, of two nonempty subsets of segment AB such that no point of S1 separates two points of S2. Then there is a unique point C in the interior of segment AB such that (A, C | P1, P2) if and only if P1 is in S1 and P2 is in S2 and C is neither P1 nor P2.
Defined Terms
Exercise 5.1.2. (a) Prove a
segment has at least three points.
(b) Prove a segment has infinitely many points.
Exercise 5.1.3. Show that the Riemann Sphere where each pair of antipodal points is a point satisfies each of the axioms.
_____________
Coxeter, H. S. M., Non-Euclidean Geometry, Fourth
Edition. University of Toronto Press, 1961.
Greenberg, Marvin J., Euclidean and Non-Euclidean
Geometries: Development and History. San Francisco: W. H. Freeman and
Company, 1974.
Hilbert, David, Foundations of Geometry (Grundlagen der Geometrie),
Second English Edition trans. by Unger,L. LaSalle: Open Court Publishing
Company, 1971 (1899).
Riemann geometry. L.A. Sidorov (originator), Encyclopedia of Mathematics.
URL: ![]() http://www.encyclopediaofmath.org/index.php?title=Riemann_geometry&oldid=15725
http://www.encyclopediaofmath.org/index.php?title=Riemann_geometry&oldid=15725
|
|
|
|
|
|
|
© Copyright 2013 - Timothy Peil |